Radio Controlled Model Sailboat
By R. C. Schmidt (W1VDY) and L. A. Williams, Raytheon Manufacturing Company
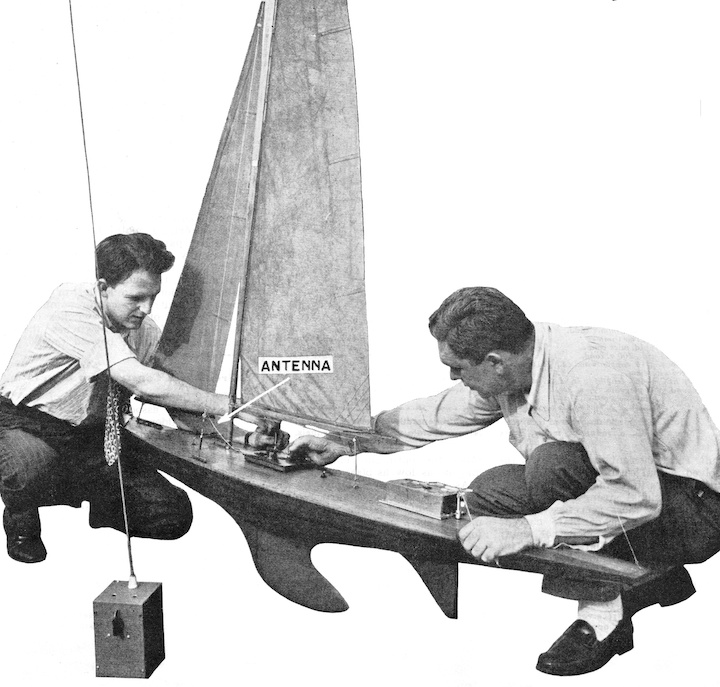
Fig. 1. Fastening antenna in position. The control unit transmitter is shown in the foreground.
Simplicity is the keynote in the design of any piece of radio remote control equipment for model boats or aircraft, because light weight, low battery consumption, trouble free operation, and low cost, all hinge upon this factor.
In the radio control of the model sailboat described here, the necessary control operations are solely those of turning the rudder either to left or right at will, this operation being performed by a small permanent magnet reversible electric motor and suitable gear train. The remote radio link must, therefore, either carry two intelligence channels or alternatively, a single channel could be used to alternately select one and then the other control operation. This “selector” system or single channel control can be made to accommodate a larger number of control operations. However, since the operations occur in a fixed sequence, it is at times a very slow and unwieldy method of control. Also, it is quite common for the receiving equipment to get out of sequence with the remote transmitter; thus some form of repositioning of the selector is necessary in the selector system, which usually boils down to another intelligence channel. For this reason a system was chosen using two separate radio channels.
The boat used for this experiment is a “Class A” type. The hull is of mahogany planked construction with a length of 6 ft and a beam of 14 in. The single mast is about 8 ft in length.
Receiver
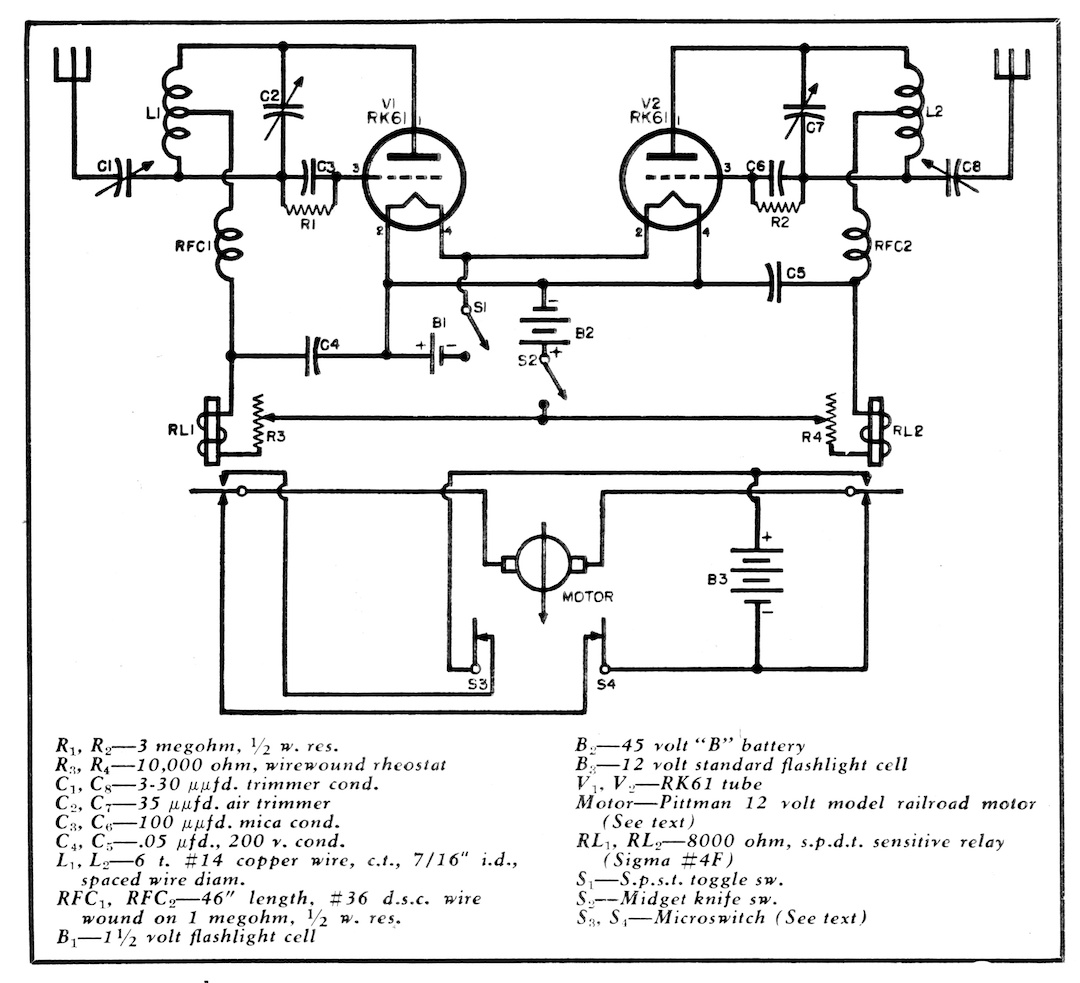
Fig. 2. Schematic diagram of receiver. Two superregenerative receivers are used as a means of reversing motor. These receivers operate on different channels.
The receiving equipment consists of two single tube receivers using Raytheon type RK61 tubes operating in the 50-54 MHz amateur band. The RK61 is a subminiature version of the prewar RK62. This tube operates in a simple superregenerative circuit, and has a small relay in its plate circuit. Plate current under “the no received signal” condition is 1.5 mA, and triggers to 0.5 mA or less depending upon signal strength. The plate circuit relay must therefore operate within this range of plate current change. The Sigma model 4F relay usually serves adequately here. This relay has an 8000-Ω coil, and can be adjusted to operate on as little as 0.2 mA current change. With some tubes, the optimum relay resistance may be as low as 5000 Ω. As regards power supply, the RK61 receiver is very economical, requiring only 1.5 V at 50 mA each for filament supply, and 45 V at 1.5 mA for the plate.
Rudder Control Mechanism
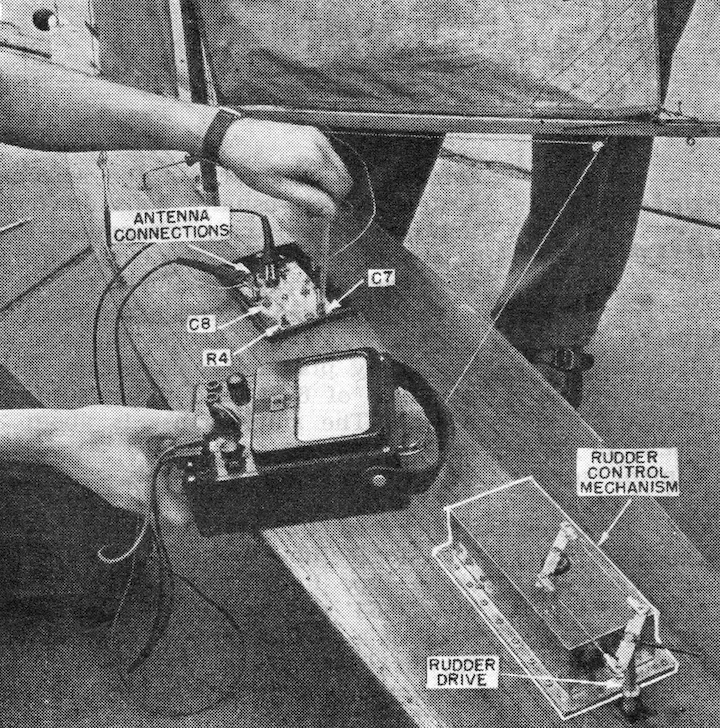
Fig. 3. Aligning receiver. A 0-5 or a 0-10 milliammeter is
clipped across the open knife switch (S2) for tuning the unit.
The motor used is a Pittman 12 V DC, 6000-rpm model railroad type, which can be obtained at any hobby craft store. It draws about 0.3 to 0.4 A under full load. In order to assure easy operation, a 3000 to 1 gear reduction was used. In length of time with the motor operating under load, the rudder may be shifted from full left to full right in about 15 seconds.
There are many ways of applying this control. The main purpose was to find a simple, positive, and variable mechanism which would be practically foolproof. The complete mechanism may be placed under the deck or above deck. The reason for placing the mechanism above deck in this case was to save hull damage in case of bad operation. The unit is enclosed in a watertight metal box with all operating parts inside (see Fig. 3). It was only necessary to drill one hole in the deck to allow for wiring. Using this method, the rudder can be moved to any position up to 90° left or right from the neutral or center point.
By the use of two microswitches (S3, S4, Fig. 2) for limit switches, the rudder cannot move beyond the 90° position.
Circuit and Construction Details
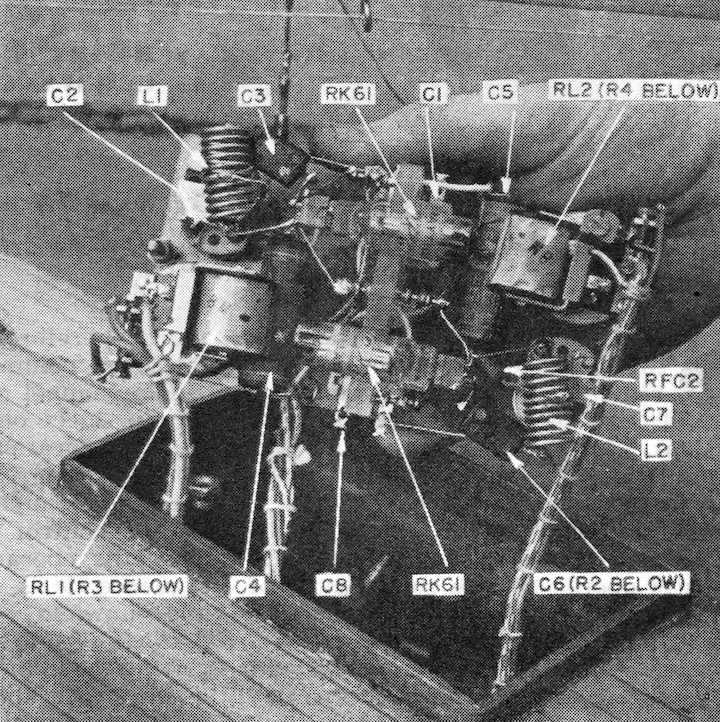
Fig 4. Under chassis view of receiver. The two sensitive relays are mounted atop the metal covers of rheostats [variable resistors — Ed.] R3, R4.
Connections from the receiver are cabled and brought to a common terminal board mounted in the bottom of the hull, as are all the leads from batteries, motor, and the limit switches on the motor. The limit switches, S3, S4, serve to open the motor circuit when the rudder has reached the limit of its travel in either direction.
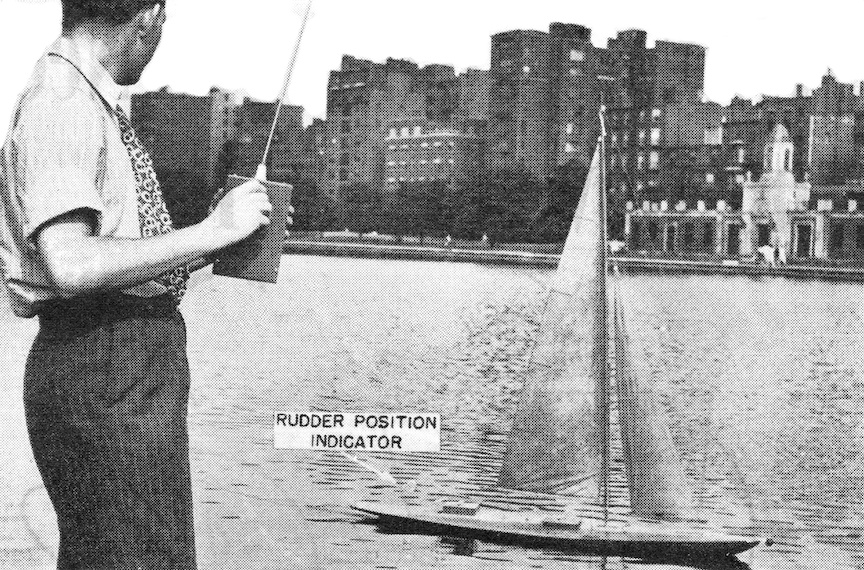
Fig. 5. “‘Coming about”‘- Boston’s Back Bay section is the backdrop for this demonstration. The rudder position indicator should be visible to the operator at all times.
The transmitter consists of a very simple push-pull oscillator using two 957 acorn tubes with 1.5 V on the filaments from two paralleled intermediate size flashlight cells. The plate supply is a pair of 67½-V “B” batteries of the type used in portable broadcast radios. The complete transmitter unit is housed in an aluminum box 4½ in x 4½ in x 10 in. The control switch S1, is a single-gang, 2-circuit, 3-position rotary switch. This switch, when turned to the left of center, connects the filaments only. When turned to the right of center, it powers the filaments, and also cuts in the padding condenser [capacitor — Ed.], C1, thus obtaining the second control channel frequency. In the interests of simplicity, it was decided to switch the filament circuit only for turning the transmitter off and on to either channel. The short time delay while the tubes are warming is unnoticeable for practical operation in this type of application. However, a separate filament switch with S1 in the plate lead would be satisfactory also.
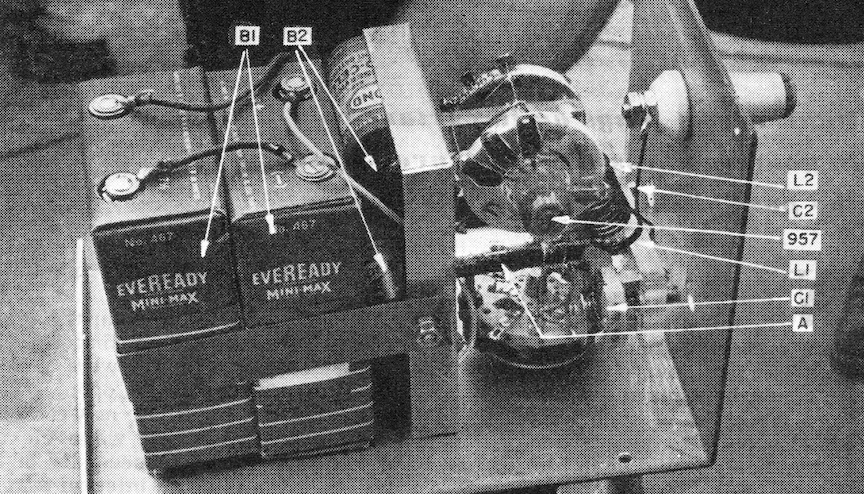
Fig. 6. Internal view of transmitter control unit. Condensers [capacitors — Ed.] C1 and C2 are mounted on a polystyrene bracket supported from the subchassis by a metal rod, A.
In tuning the transmitter, S1, is turned so that C1 is not connected. Then C2 is tuned to the high frequency control channel, i.e., approximately 53 MHz. Then, switching over to the position which includes C1 in the circuit, C1 is tuned for the low frequency channel at 51 MHz. It has been found more convenient to set the transmitter just once, and make subsequent tuning adjustments on the two receivers. Thus, having once set the transmitter well within the band, there will be no danger of getting outside of it. Incidentally, the usual FCC regulations hold in this type of service; a licensed radio amateur must be present during operation.
Operation
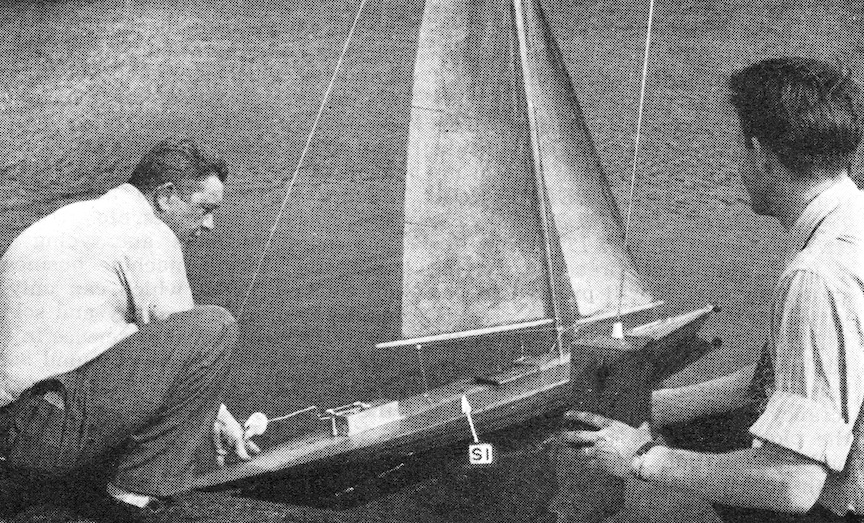
Fig. 7. Boat carries 500 in2 of sail to conform with the Class A racing standards.
Receiving antennas are formed from an insulated portion of the mainmast stays. The total length of the receiver antennas should be 46 in from the small rods coming up from each receiver through the hatch cover. Fahnestock clips may be used to connect the antennas to the rods.
The sensitive relays will probably need some adjustment. The back contact should be set originally for about 0.025 in clearance between the relay armature and the winding core face. Then adjust the fore contact clearance for about 0.003 in or the thickness of a piece of paper when the relay is open. Then, with the receiver in operation, vary the adjusting spring tension so that the fore contact closes at 1.4 mA The plate current of the receiver may be conveniently varied for this test by means of the plate resistors, R3, R4. If the relay drops out at less than 1 mA plate current, the relay contacts are set too wide. Optimum adjustment of the relay will yield a pull-in current of 1.4 mA, and a drop-out current of 1.1-1.2 mA.
After the preliminary adjustment of the relays, the plate current on each receiver should be set for 1.5 mA (3 mA total “B” battery drain). With no signal, a slight ragged-sounding audio note of about 600 Hz will be heard from each relay. This is relay chatter at the 600 Hz superregenerative quench frequency, and is quite normal. Turn the transmitter on, and vary C2 of the receiver until the plate current takes a radical dip. Tune for minimum plate current. Repeat for the other receiver, using the other transmitter channel. It is always a good idea to walk the transmitter off 25 or 50 feet and run through a few operations before actually putting the ship in the water.
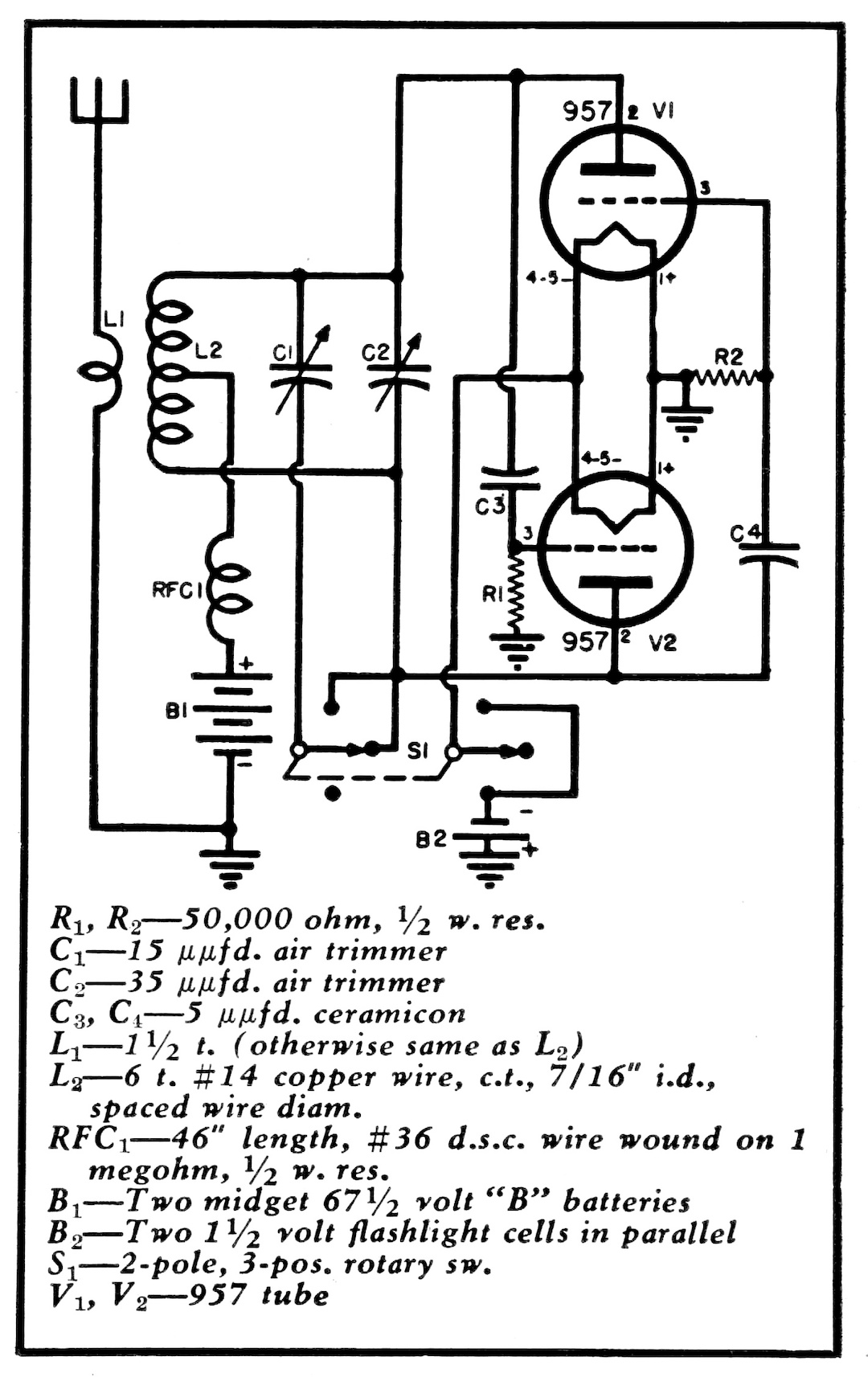
Fig. 8. Schematic diagram of transmitter – a simple push-pull oscillator.
Now, just a few words about controlling the boat. In “coming about,” apply full rudder until the limit switch stops the rudder in a full rudder position. The boat then heads up into the wind. Then, just as the wind carries the mainsheet boom across, use opposite rudder control to bring the rudder amidships again. After a few hours of operation, the “feel” of the control will allow the operator to time his control operations nearly perfectly. However, it has been found convenient to put on some sort of rudder position indicator. This consists of some easily seen mass hung on a six-inch arm to move along with the rudder. Experimentally, we used first a wad of white cotton, and then a small chromium plated vane. A ping pong ball would be ideal. With the boat under sail on a specified course, the operator will quickly recognize his greatest fault—that of over-controlling. Very short pulses of control time then suffice to keep the boat headed on course.
Variation
A considerable saving in weight is possible by the use of the new mercuric oxide batteries which should be available in quantity very soon. Also by increasing R3, R4 to 50,000 Ω, the smaller size 67½-V “B” battery can replace the larger 45-V size. Prospective builders of this equipment should also look into the possibility of using the new ultrasmall and rechargeable wet cells. Also some small electric motors by Pittman are made for 6-V operation.
The possibility of using two channels at once should not be overlooked. Referring to the receiver circuit diagram (Fig. 2), it will be seen that if both receivers are operating at once, the motor circuit will not be energized. Thus, if a third sensitive relay is placed in the “B+” line, and it is adjusted to open at 1.5 mA or less, this relay will operate only when both receivers are signaled, but not when either one alone is. Thus, this third relay affords a third control operation through the use of only two channels. However, two separate transmitters and transmitting antennas must then be used.
It is strongly suggested that the model sailboat enthusiast ally himself with some competent radio amateur rather than try to build his own control equipment, for though the radio gear is simple as radio gear goes, still the experience factor in the building and “de-bugging” stages of the project will count for a lot of wasted time and sleepless nights.